Investigate methodologies to increase the inherent safety of a large collaborative robot, used in the automotive industry to move heavy-weight parts, and enable better operator interaction, increasing productivity.
The design challenge encompasses several areas: from the fundamental one of safety – given the proximity and close interaction of the robot with the operator – to the speed of movement, which is linked to productivity but has implications for the lightness of the entire machine.
Loson is tasked with designing the robot casing, solving technological challenges and coordinating with Comau, the manufacturer, to engineer the production and interfaces with the structure.
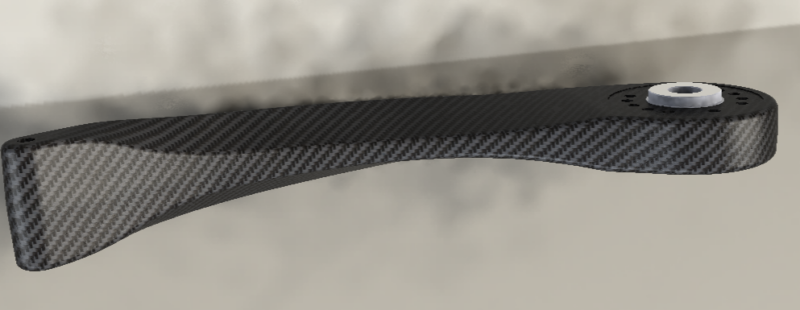
The starting point was the study of protective casings and cladding made of sandwiched reinforced fiberglass and carbon fiber shells – aircraft-derived technologies that are light as well as strong and resistant.
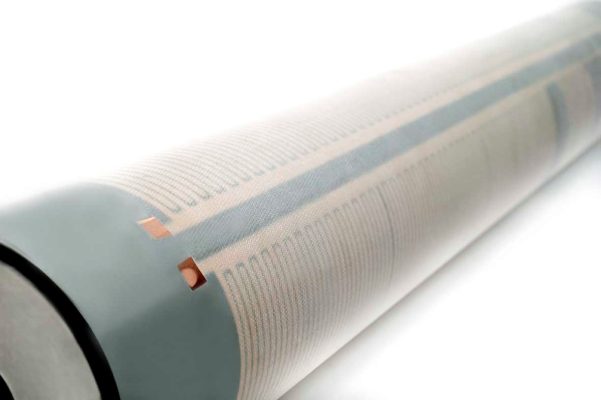
As a next step, Loson applied its expertise in electronics and the design of multiphysics systems, in which electrical circuits are integrated with the composite to make crankcases equipped with sensitive skins that could also natively perform safety functions. It was therefore necessary to study the interactions between the sensors and the electrical part, the electromagnetic fields, and the interface with the robot’s control system.
In this way, the entire robot became a sensor able to detect human presence and autonomously slow down or stop depending on the interactions.